/*
Ks0206 Keyestudio SR01 Ultrasonic Sensor
_________________________________
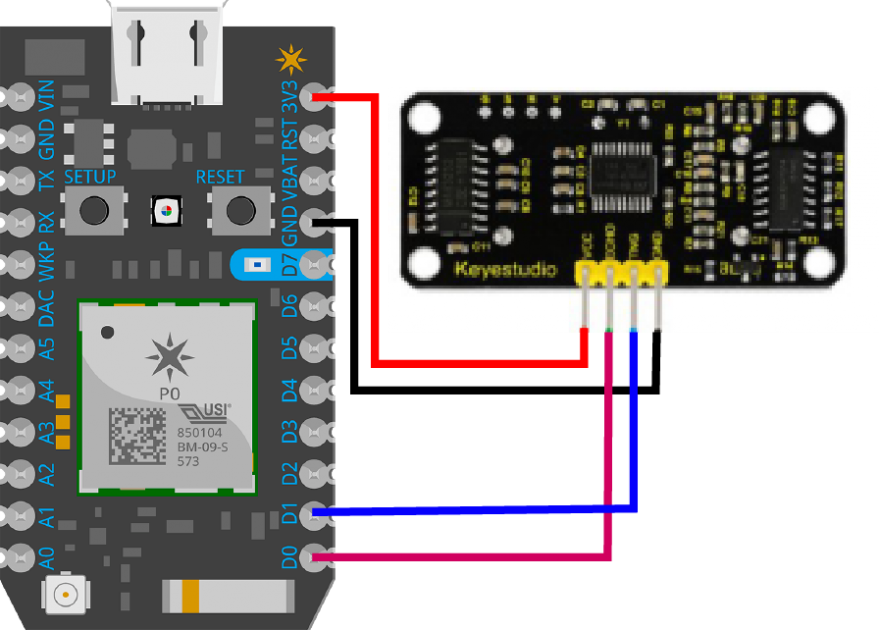
| SETUP |
|Sensor pin :: Particle pin |
| + :: 3.3v |
| ECHO :: D0 |
| TRIG :: D1 |
| - :: GND |
|_________________________________|
SPECIFICATIONS:
digital sensor
detects distance through echolation
uses a trigger pin that sends a sound wave and a receiver to detect objects proximity
value in cm
max Range 5m
min Range 2cm
src: https://wiki.keyestudio.com/Ks0206_Keyestudio_SR01_Ultrasonic_Sensor
GITHUB REPOSITORY:
https://github.com/apanin/ParticleKeyeStudio37sensorKitExamples
*/
#define echoPin D0 // Echo Pin
#define trigPin D1 // Trigger Pin
#define LEDPin D6 // Onboard LED
#define maximumRange 200
#define minimumRange 0
long duration, distance; // Duration used to calculate distance (time measure)
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(LEDPin, OUTPUT); // Use LED indicator (if required)
}
void loop() {
/* The following trigPin/echoPin cycle is used to determine the
distance of the nearest object by bouncing soundwaves off of it. */
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
//Calculate the distance (in cm) based on the speed of sound.
distance = duration/58.2;
if (distance >= maximumRange || distance <= minimumRange){
/* Send a negative number to computer and Turn LED ON
to indicate "out of range" */
Serial.println("-1");
digitalWrite(LEDPin, HIGH);
}
else {
/* Send the distance to the computer using Serial protocol, and
turn LED OFF to indicate successful reading. */
Serial.println(distance);
digitalWrite(LEDPin, LOW);
}
//Delay 50ms before next reading.
delay(50);
}